Monocular Visual Odometry in Rust (KITTI)
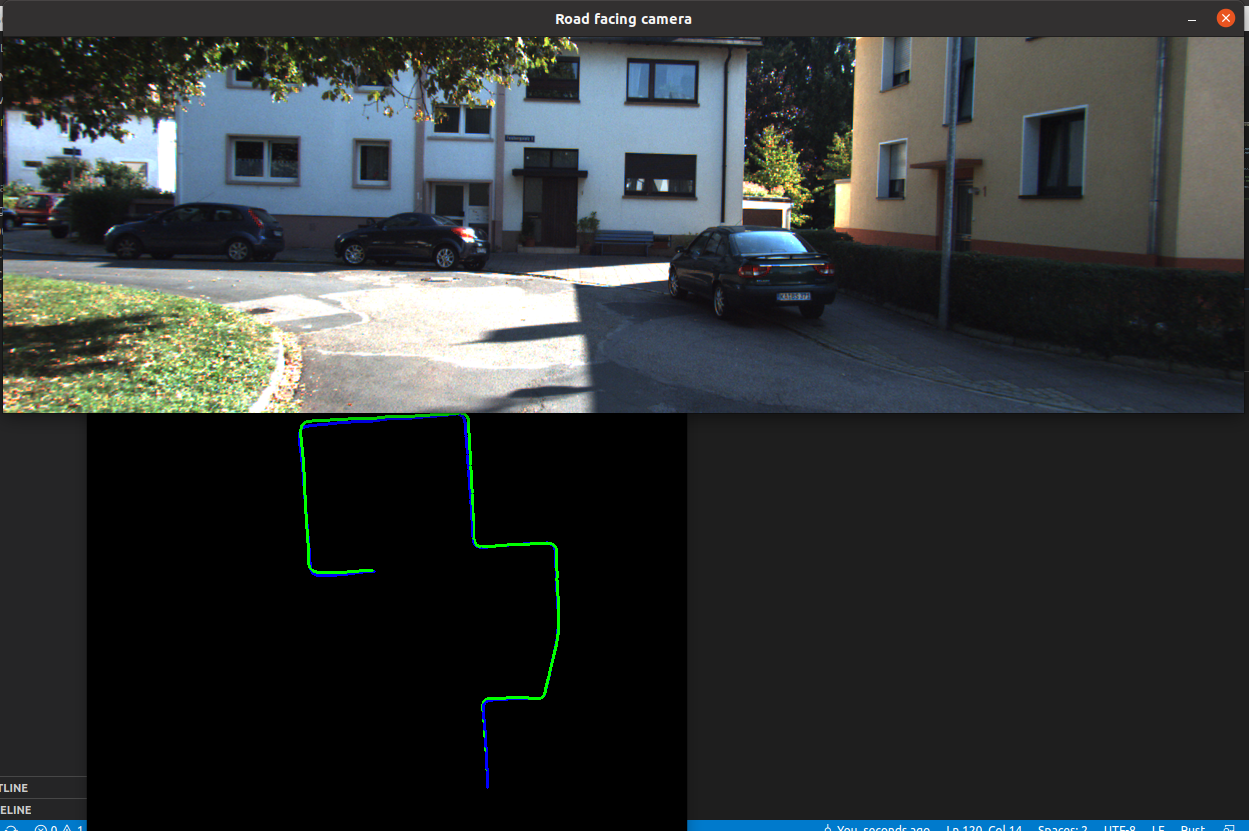
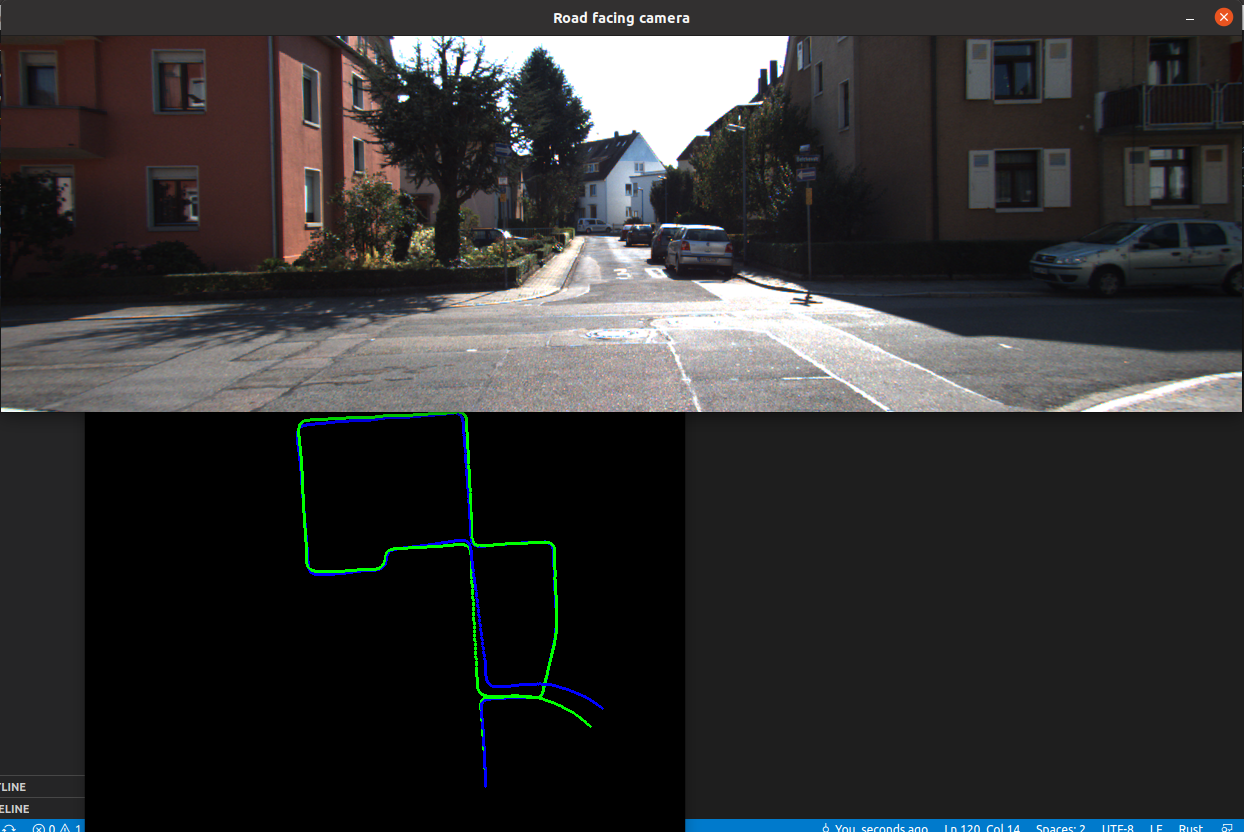
Built a monocular visual odometry (VO) pipeline in Rust on the KITTI benchmark. Implemented feature tracking, pose estimation, and trajectory reconstruction, with plotting utilities to compare estimated trajectories against ground truth.
Benchmarked VO accuracy across sequences and experimented with tuning feature detection thresholds and RANSAC parameters to handle motion blur and texture-poor regions. Added demos and visualizations to highlight drift over long trajectories and loop-closure opportunities.
Git Repository
layout: post title: Monocular Visual Odometry (Rust) —
- Monocular visual odometry implementation based on blog post
- The implementation is done is Rust.
- Used Kitti dataset for experiment.
- Git Repository
Enjoy Reading This Article?
Here are some more articles you might like to read next: